The 10K Rig Project
One of our expert hardware devs, Samuel Meirlaen, is in charge of DeoVR's "10K Rig" project. He has been working on this intensive project for months and below you can read a detailed update of his progress to date. To join in the discussion, visit our friendly forum where you can reply to Samuel directly.
Hello everyone, thanks for your patience. My name is Samuel Meirlaen, and as the hardware dev. contractor for the "10k rig" project, I am happy to share a summary of our progress to date.
Our primary objective was to produce a high-performance 3D VR stereoscopic camera optimized for point-of-view (POV) recordings. The initial plan was to combine industrial sensors and the best fisheye optics on the market. We chose the GMAX0505 sensor from Gpixel as our proof-of-concept prototype. With a resolution of 5120x5120 pixels and a maximum frame rate of 150 fps, this sensor was chosen over the Sony Pregius S IMX530 for its perfectly square form factor, which is better suited for equirectangular fisheye recordings.

We sourced the sensor from Emergent Vision Tech (EVT), a Canadian company that packages this sensor in a camera module with reference HB-25000-G. This module has a 25GigE SFP28 connector that converts through optic fibre to a Network Interface Card (NIC) with ref. PH-25-DUAL at EVT. The NIC plugs into a server with a PCIe Gen3 x8 interface, which processes the data. Separately, power has to be supplied to the camera modules aswel. From the start, this prototype wasn't designed to be standalone.

For optics, we selected the Izugar MKX200 Apochromatic lens, designed to reduce chromatic aberrations and equipped with an MFT mount in its standard version.

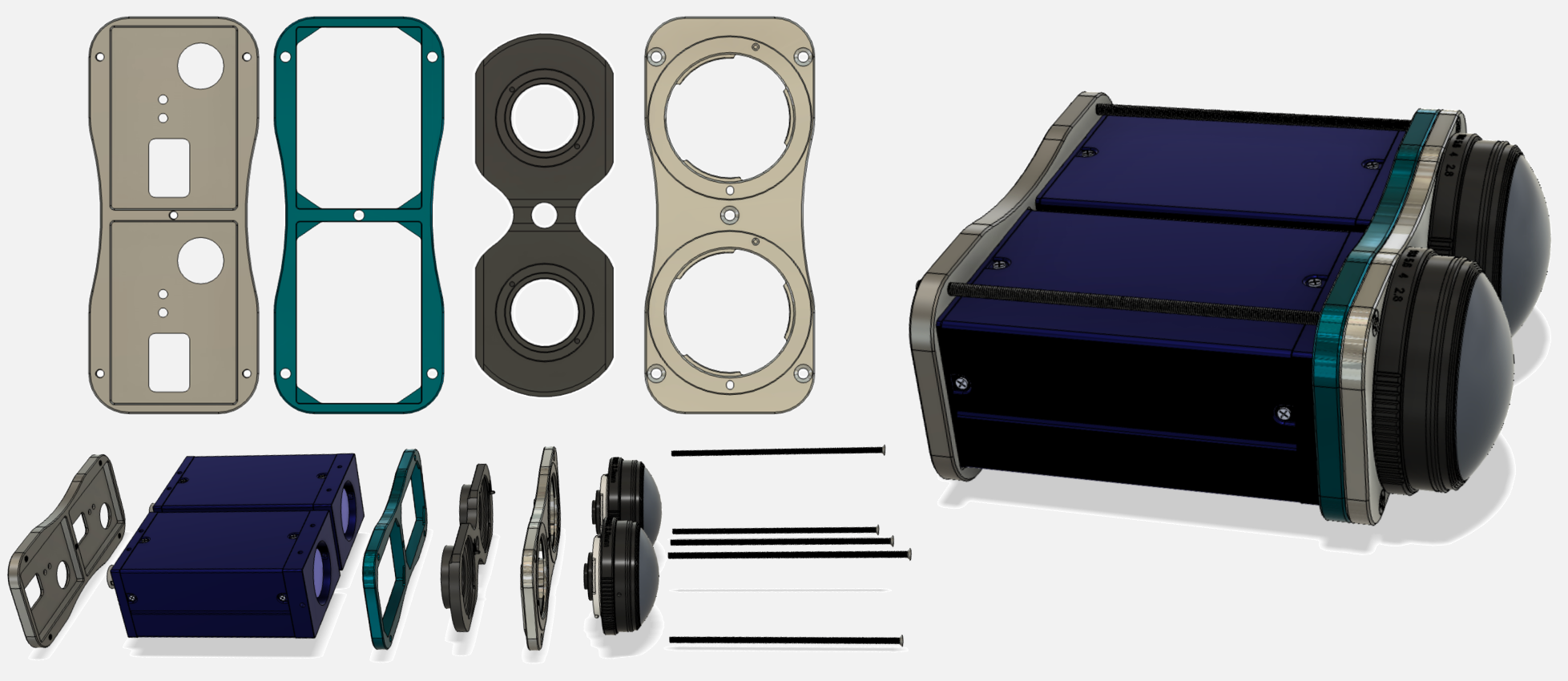
Since the EVT camera modules have a standard C-mount, I designed high-precision CNC-machined plates to interface the MKX200 lens perfectly with the C-mount, respecting the necessary flange focal distance to create the largest focused image imprint on the Gpixel sensor surface.
 These plates maintain both camera modules together, parallel to each other, with an inter-optical distance of 64mm.
These plates maintain both camera modules together, parallel to each other, with an inter-optical distance of 64mm.
While I got the physical elements manufactured, we worked with my colleagues on assembling a server capable of recording data from both sensors and storing them in real-time. The original software provided by EVT for recording has exporting options in RAW Bayer8 or 10, Adobe DNG, or TIFF file arrays. As one single frame from one sensor in Bayer8 weighs 26.2 MB, both sensors recording at 75 fps required the ability to write data sustainably at around 4 Gbps.
Initially, we considered the Samsung 980 Pro NVMe with an M.2 interface, which is rated for a top writing speed of around 5000 Mbps. However, we learned during testing that this speed could not be sustained long-term a rendered the system unstable. Recently, we opted to use two KIOXIA SSD drives (ref KCM61RUL7T68), which could sustain this writing speed long-term.

After few successful recordings with the rig, we encountered a new issue regarding light sensitivity of the Gpixel Gmax0505 sensor. Although the Sony Pregius S IMX530 sensor has a dynamic range of 70 dB, the Gmax0505 only reaches up to 60 dB, which shows to be too low for our use, even with a ton of light compensation.
In retrospect, the Sony IMX530 would have been a better choice in terms of color and light sensitivity, even though it would reduce the effective resolution to 4600x4600 pixels per frame maximum, or 21.16 Mpix per frame of useful content. (Which we agree is still a very high performing VR camera)
Throughout the course of this project, I undertook the task of designing a complete custom enclosure to house the naked camera module from EVT.
 The enclosure was not designed with aesthetics in mind, but rather for optimal functionality as a point-of-view camera, positioned just above the user's line of sight and as close as possible to their forehead. To ensure that the design is optimized for heat dissipation, a large thermal radiator was incorporated, which eliminates the need for noisy fans.
The enclosure was not designed with aesthetics in mind, but rather for optimal functionality as a point-of-view camera, positioned just above the user's line of sight and as close as possible to their forehead. To ensure that the design is optimized for heat dissipation, a large thermal radiator was incorporated, which eliminates the need for noisy fans.
Additionally, this design boasts one of the shallowest VR cameras available on the market, at least at this performance level, with only 65mm of distance between the top of the optic and the user's forehead. This disposition allows for the best possible perspective and proprioception at the VR-spectator's end.

The design is not intended to be strapped to the user's head, due to its weight and the stabilization issues this would generate. Instead, the design includes countless options for NATO-grips, shoulder rig fixtures, guimbal fixtures, and more, in order to ensure a proper and stable placement for the user on set.

While the camera is not yet mobile, future iterations of this 10kRig project could involve a complete redesign of custom PCBs with integrated power and storage solutions, enabling the prototype to become a standalone device. However, the challenges involved in achieving this at such a high performance level remain unknown. Suggestions on how to turn this prototype into a standalone version are welcomed and appreciated.
On the video processing side, an entirely new workflow was necessary to manage recording at such high data streams. The overall resolution currently needs to be downsized to 80% of its original resolution to be displayed on Recent VR headsets, limited to 60fps for most. Despite these limitations, the design is future-proof and will allow for optimal 3DVR productions with ample room for non-destructive post-processing effects.
Although many challenges associated with this project have been successfully addressed, several challenges remain to make this camera accessible to every VR production studio. Please stay tuned for the next stages of our evolution and share your thoughts about our progress so far!
See this post on our busy, friendly forum to join in the discussion, as well as speak to Samuel directly.
